Unionfs: User- and Community-Oriented Development of a
Unification File System
David Quigley, Josef Sipek, Charles P. Wright, and Erez Zadok
Stony Brook University
{dquigley,jsipek,cwright,ezk}@cs.sunysb.edu
Appears in the proceedings of the 2006 Ottawa Linux Symposium (OLS 2006)
Abstract
Unionfs is a stackable file system that virtually merges a set of
directories (called branches) into a single logical view. Each branch
is assigned a priority and may be either read-only or read-write.
When the highest priority branch is writable, Unionfs provides
copy-on-write semantics for read-only branches. These copy-on-write
semantics have lead to widespread use of Unionfs by LiveCD
projects including Knoppix and SLAX. In this paper we describe our
experiences distributing and maintaining an out-of-kernel module since
November 2004. As of March 2006 Unionfs has been
downloaded by over 6,700 unique users and is used by over two dozen
other projects. The total number of Unionfs users, by extension, is
in the tens of thousands.
1 Introduction
Unionfs is a stackable file system that allows users to specify a
series of directories (also known as branches) which are presented to
users as one virtual directory even though the branches can come from
different file systems. This is commonly referred to as namespace
unification. Unionfs uses a simple priority system which gives each
branch a unique priority. If a file exists in multiple branches, the
user sees only the copy in the higher-priority branch. Unionfs allows
some branches to be read-only, but as long as the highest-priority
branch is read-write, Unionfs uses copy-on-write semantics to provide
an illusion that all branches are writable. This feature allows
Live-CD developers to give their users a writable system based on
read-only media.
There are many uses for namespace unification. The two most common
uses are Live-CDs and diskless/NFS-root clients. On Live-CDs, by
definition, the data is stored on a read-only medium. However, it is
very convenient for users to be able to modify the data. Unifying the
read-only CD with a writable RAM disk gives the user the illusion of
being able to modify the CD. Maintaining an identical system
configuration across multiple diskless systems is another application
of Unionfs. One simply needs to build a read-only system image, and
create a union for each diskless node.
[Wrapfs layers over a single directory.]
[Unionfs layers over multiple directories.]
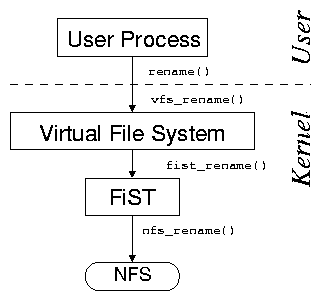
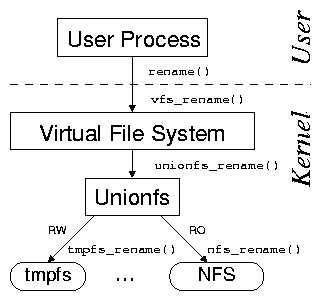 Figure 1: User processes issue system calls, which the kernel's virtual
file system (VFS) directs to stackable file systems. Stackable file
systems in turn pass the calls down to lower-level file systems
(e.g., tmpfs or NFS).
Unionfs is based on the FiST stackable file system templates, which
provide support for layering over a single
directory [12]. As shown in
Figure 1(a), the kernel's VFS is responsible for
dispatching file-system-related system calls to the
appropriate file system. To the VFS, a stackable file system appears
as if it were a standard file system, but instead of storing or
retrieving data, a stackable file system passes calls down to lower-level
file systems that are responsible for data storage and retrieval.
In this scenario, NFS is used as the lower-level file system, but any
file system can be used to store the data (e.g., Ext2, Ext3,
Reiserfs, SQUASHFS, isofs, and tmpfs).
To the lower-level file systems, a stackable file system appears as
if it were the VFS. This makes stackable file system development
difficult, because the file system must adhere to the conventions both
of file systems (for processing VFS calls) and of the VFS (for making
VFS calls).
As shown in Figure 1(b), Unionfs extends the FiST
templates to layer over multiple directories, unify directory
contents, and perform copy-on-write. In this example, Unionfs is
layered over two branches: (1) a read-write tmpfs file system
and (2) a read-only NFS file system. The contents of these file
systems are virtually merged, and if operations on the NFS file system
return the read-only file system error code (EROFS) then
Unionfs transparently copies the files to the tmpfs branch.
We originally released Unionfs in November 2004, after roughly
18 months of development as a research
project [10,11]. We released Unionfs as a
standalone kernel module because that was the most expedient way for
users to begin using it and it required less initial effort on our
part. Unionfs was quickly adopted by several LiveCDs such as
SLAX [7] (December 2004) and Knoppix [5]
(March 2005). As of March 2006, Unionfs has been
downloaded by over 6,700 users from 81 countries and is distributed
as part of other projects. Our mailing list currently has 336
subscribers with 53 of them subscribed to our CVS update list.
Unionfs is an integral part of several LiveCDs, so the actual number of
Unionfs users is much larger.
Maintaining Unionfs out side of the kernel has both benefits and
complications. By maintaining the tree out side of the kernel, our user
base is expanded: users can still use their vendor's kernel, and we are
able to support several kernel versions. We were also able to release
Unionfs more frequently than the kernel. However, this makes our code
more complex since we must deal with changing interfaces between
kernel versions. It also raises questions about the point at which
support for a particular older kernel version should be dropped. At
this point, Unionfs has become established enough that we are
moving towards a release that is ready for mainline kernel
submission.
Unionfs has complex allocation schemes (particularly for dentry and
inode objects), and makes more use of kmalloc than other file
systems. One hurdle we had to overcome was lack of useful
memory-allocation debugging support. The memory-allocation debugging
code in recent -mm kernels does not provide sufficient
debugging information. In our approach, we log kmalloc and dentry
allocations, and then post-process the log to locate memory leaks
and other errors.
In our efforts to move toward kernel inclusion we have come across
many aspects that conflict with maintaining an out-of-kernel module.
One of the main issues is the ability to separate research code
from practical code. Features such as persistent inodes and
atomically performing certain operations increase code complexity,
conflicting with the mantra "less code is better code." We also had
to change the way we separate file system components to provide
simpler and more easily maintainable code. In addition to this, we
also have to keep up with changes in kernel interfaces such as the
change of locking primitives introduced in Linux 2.6.16.
The rest of this paper is organized as follows. In
Section 2 we describe Unionfs use cases. In
Section 3 we describe the challenges of
maintaining an out-of-tree module. In Section 4
we describe some limitations of Unionfs. In
Section 5 we present a brief performance
evaluation of Unionfs. Finally, we conclude in
Section 6.
Figure 1: User processes issue system calls, which the kernel's virtual
file system (VFS) directs to stackable file systems. Stackable file
systems in turn pass the calls down to lower-level file systems
(e.g., tmpfs or NFS).
Unionfs is based on the FiST stackable file system templates, which
provide support for layering over a single
directory [12]. As shown in
Figure 1(a), the kernel's VFS is responsible for
dispatching file-system-related system calls to the
appropriate file system. To the VFS, a stackable file system appears
as if it were a standard file system, but instead of storing or
retrieving data, a stackable file system passes calls down to lower-level
file systems that are responsible for data storage and retrieval.
In this scenario, NFS is used as the lower-level file system, but any
file system can be used to store the data (e.g., Ext2, Ext3,
Reiserfs, SQUASHFS, isofs, and tmpfs).
To the lower-level file systems, a stackable file system appears as
if it were the VFS. This makes stackable file system development
difficult, because the file system must adhere to the conventions both
of file systems (for processing VFS calls) and of the VFS (for making
VFS calls).
As shown in Figure 1(b), Unionfs extends the FiST
templates to layer over multiple directories, unify directory
contents, and perform copy-on-write. In this example, Unionfs is
layered over two branches: (1) a read-write tmpfs file system
and (2) a read-only NFS file system. The contents of these file
systems are virtually merged, and if operations on the NFS file system
return the read-only file system error code (EROFS) then
Unionfs transparently copies the files to the tmpfs branch.
We originally released Unionfs in November 2004, after roughly
18 months of development as a research
project [10,11]. We released Unionfs as a
standalone kernel module because that was the most expedient way for
users to begin using it and it required less initial effort on our
part. Unionfs was quickly adopted by several LiveCDs such as
SLAX [7] (December 2004) and Knoppix [5]
(March 2005). As of March 2006, Unionfs has been
downloaded by over 6,700 users from 81 countries and is distributed
as part of other projects. Our mailing list currently has 336
subscribers with 53 of them subscribed to our CVS update list.
Unionfs is an integral part of several LiveCDs, so the actual number of
Unionfs users is much larger.
Maintaining Unionfs out side of the kernel has both benefits and
complications. By maintaining the tree out side of the kernel, our user
base is expanded: users can still use their vendor's kernel, and we are
able to support several kernel versions. We were also able to release
Unionfs more frequently than the kernel. However, this makes our code
more complex since we must deal with changing interfaces between
kernel versions. It also raises questions about the point at which
support for a particular older kernel version should be dropped. At
this point, Unionfs has become established enough that we are
moving towards a release that is ready for mainline kernel
submission.
Unionfs has complex allocation schemes (particularly for dentry and
inode objects), and makes more use of kmalloc than other file
systems. One hurdle we had to overcome was lack of useful
memory-allocation debugging support. The memory-allocation debugging
code in recent -mm kernels does not provide sufficient
debugging information. In our approach, we log kmalloc and dentry
allocations, and then post-process the log to locate memory leaks
and other errors.
In our efforts to move toward kernel inclusion we have come across
many aspects that conflict with maintaining an out-of-kernel module.
One of the main issues is the ability to separate research code
from practical code. Features such as persistent inodes and
atomically performing certain operations increase code complexity,
conflicting with the mantra "less code is better code." We also had
to change the way we separate file system components to provide
simpler and more easily maintainable code. In addition to this, we
also have to keep up with changes in kernel interfaces such as the
change of locking primitives introduced in Linux 2.6.16.
The rest of this paper is organized as follows. In
Section 2 we describe Unionfs use cases. In
Section 3 we describe the challenges of
maintaining an out-of-tree module. In Section 4
we describe some limitations of Unionfs. In
Section 5 we present a brief performance
evaluation of Unionfs. Finally, we conclude in
Section 6.
2 Use Cases
We have identified three primary use cases for Unionfs. All of these
common use cases leverage Unionfs's copy-on-write semantics. The
first and most prevalent use of Unionfs is in LiveCDs. The second
is using Unionfs to provide a common base for several NFS-mounted
machines. The third is to use Unionfs for snapshotting.
LiveCDs.
LiveCDs allow users to boot Linux without modifying any data on a hard
disk. This has several advantages:
- Users can try Linux without committing to it [5,7].
- Special-purpose open-source software can be distributed to
non-technical users (e.g., for music composition [4]).
- System administrators can rescue machines more easily [2].
- Many similar machines can be set up without installing software
(e.g., in a cluster environment [9], or at events that require
certain software).
The simplest use of Unionfs for LiveCDs unifies a standard read-only
ISO9660 file system with a higher-priority read-write tmpfs
file system. Current versions of Knoppix [5] use such a
configuration, which allows users to install and reconfigure programs.
Knoppix begins its boot sequence by loading an initial RAM disk
(initrd) image of an Ext2 file system and then executing a
shell script called /linuxrc. The linuxrc script
first mounts the /proc and /sys file systems. Next,
Knoppix loads various device drivers (e.g., SCSI, IDE, USB, FireWire)
and mounts a compressed ISO9660 image on /KNOPPIX. After the
Knoppix image is mounted, the Unionfs module is loaded. Next a
tmpfs file system is mounted on /ramdisk. Once
Unionfs is mounted, this RAM disk becomes the destination for all of
the changes to the CD-ROM. Next, the directory /UNIONFS is
created and Unionfs is mounted on that directory with the following
command:
mount -t unionfs \
-o dirs=/ramdisk=rw:/KNOPPIX=ro \
/UNIONFS /UNIONFS
The -t unionfs argument tells the mount program that
the file system type is Unionfs. The option specifies the directories that
make up the union. Directories are listed in a order of priority,
starting with the highest. In this case, the highest-priority
directory is /ramdisk, which is read-write. The
/ramdisk directory is unified with /KNOPPIX, which
is read-only. The first /UNIONFS argument is a placeholder
for the device name in /proc/mounts, and the second
/UNIONFS argument is the location where Unionfs is mounted.
Finally, linuxrc makes symbolic links from the root directory
to /UNIONFS. For example, is a link to
.
At this point the linuxrc script exits, and init is
executed.
Other LiveCDs (notably SLAX [7]) use Unionfs both for its
copy-on-write semantics and as a package manager. A SLAX distribution
consists of several modules, which are essentially SQUASHFS
file system images [6]. On boot, the selected modules are
unified to create a single file system view. Unifying the file
systems makes it simple to add or remove packages from the LiveCD,
without regenerating entire file system images. In addition to the
SQUASHFS images, the highest-priority branch is a read-write
tmpfs which provides the illusion that the CD is
read-write.
SLAX uses the pivot_root system call so that the root
file system is indeed Unionfs, whereas Knoppix creates symbolic
links to provide the illusion of a Unionfs-rooted CD. SLAX also
begins its boot sequence by loading an Ext2 initrd image and
executing linuxrc, which mounts /proc and
/sys. Next, SLAX mounts tmpfs on /memory. The next
step is to mount Unionfs on /union with a single branch
/memory/changes using the following command:
mount -t unionfs \
-o dirs=/memory/changes=rw
unionfs /union
Aside from the branch configuration, the major difference between this
command and the one from Knoppix is that instead of using
/UNIONFS as a placeholder, the text unionfs is used
instead. We recommend this approach (or better yet, the string
none), because it is less likely to be confused with an
actual path or argument.
rootfs / rootfs rw 0 0
/dev/root /mnt/live ext2 rw,nogrpid 0 0
/proc /mnt/live/proc proc rw 0 0
tmpfs /mnt/live/memory tmpfs rw 0 0
unionfs / unionfs rw,dirs=/mnt/live/memory/changes=rw:...:/mnt/live/
-> memory/images/02_core.mo=ro:/mnt/live/memory/images/01_kernel.mo=ro
-> 0 0
/dev/hdb /mnt/live/mnt/hdb iso9660 ro 0 0
/dev/hdb /boot iso9660 ro 0 0
/dev/loop0 /mnt/live/memory/images/01_kernel.mo squashfs ro 0 0
/dev/loop2 /mnt/live/memory/images/02_core.mo squashfs ro 0 0
...
Figure 2: The /proc/mounts file on SLAX after linuxrc
is executed. Note that the Unionfs line has been split (denoted by
->). For brevity, we exclude seven additional SLAX packages.
After mounting the mostly empty Unionfs, SLAX performs hardware detection.
The next step is to load the SLAX modules, which are equivalent to
packages. The first step in loading a module is to mount the
SQUASHFS image on /memory/images. After the SQUASHFS image
is mounted, SLAX calls our unionctl to insert the module into
the Union. The following command is used to insert SLAX's kernel
module:
unionctl /union --add \
--after 0 --mode ro \
/memory/images/01_kernel
The --after 0 argument instructs Unionfs to insert the new
directory, /memory/images/01_kernel, after the first branch,
and the --mode ro argument instructs Unionfs to mark this
branch read-only.
This process is repeated for each module. SLAX then creates
/union/proc, /union/sys, /union/dev,
/union/tmp, and /union/mnt/live. SLAX then changes
the present working directory to /union and unmounts
/sys. Next, Unionfs is made the root file system using
pivot_root:
pivot_root . mnt/live
This command makes Unionfs the root file system, and
remounts the initial RAM disk on /union/mnt/live. Finally,
SLAX starts init using Unionfs as the root file system:
/usr/bin/chroot . sbin/init
After this procedure, SLAX produces the /proc/mounts file
seen in Figure 2.
NFS-mounted machines.
Another use of Unionfs is to simplify the administration of diskless
machines. A set of machines can share a single read-only NFS root
file system. This enables administrators to maintain a common image
for all of the machines. This root file system is then unified with a
higher-priority read-write branch so that users can customize the
machine or save data. If persistence is not required, then a
tmpfs file system can be used as the highest priority branch.
If persistence is required, then a read-write NFS mount or a
local disk could be used for the user's files.
/bin client1(ro) client2(ro)
/store/client1 client1(rw)
/store/client2 client2(rw)
Figure 3: The contents of /etc/exports on the
server which contains the clients' binaries.
mount -t nfs server:/bin /mnt/nfsbins
mount -t nfs server:/store/`hostname -s` /mnt/persist
mount -t unionfs none /bin -o dirs=/mnt/persist:/mnt/nfsbins=nfsro
Figure 4: Creating a union with two NFS-based shares for
binaries and persistent data.
Figure 3 shows a sample NFS /etc/exports
file for a diskless client configuration. To ensure that none of the
clients can tamper with the shared binaries on the server, we export
the /bin directory read-only. We then export the persistent
storage folder for each client individually. This ensures that one
client cannot tamper with the persistent folder of another.
Figure 4 shows the commands used to create a
union from a shared binary directory and to provide a persistent
backing store for that directory on a second NFS mount. The first
command mounts /bin for our client. The next command mounts
the persistent data store for our client based on its hostname.
Finally, we create a union containing the exported /bin and
/store/`hostname -s` directories and mount it at
/bin on our local client. To have a full system that is
exported via NFS, one simply exports / instead of just
/bin. This permits a full system to be exported to the
diskless clients. However, such a set requires the additional steps
present in LiveCDs which allows you to use /proc and
/dev.
Snapshotting.
The previous usage scenarios all assumed that one or more components
of the union were read-only by necessity (either enforced by hardware
limitations or the NFS server). Unionfs can also provide
copy-on-write semantics by logically marking a physically read-write
branch as read-only. This enables Unionfs to be used for file system
snapshots.
To create a snapshot, the unionctl tool is used to invoke
branch management ioctls that dynamically modify the union
without unmounting and remounting Unionfs. First, unionctl
is used to add a new high-priority branch. For example, the following
command adds /snaps/1 as the highest priority branch to a
union mounted on /union:
unionctl /union --add /snaps/1
Next, unionctl is called for each existing branch to mark
them as read-only. The following command will mark the branch
/snaps/0 read-only:
unionctl /union --mode /snaps/0 ro
Any changes made to the file system take place only in the read-write
branch. Because the read-write branch has a higher priority than all
the other branches, users see the updated
contents.
3 Challenges
While developing Unionfs we encountered several issues that we feel
developers should address before they decide whether or not to aim for
kernel inclusion. Backward compatibility, changes in kernel
interfaces, and experimental code are three such issues. In section
3.1, we consider the advantages and disadvantages of maintaining a
module outside of the mainline kernel. In section 3.2, we discuss the
implications of developing a module that is aiming for inclusion in
the mainline Linux kernel.
3.1 Developing an out of kernel module
When first releasing Unionfs, we wanted to ensure that as many people
as possible could use it. To accommodate this, we attempted to
provide backward compatibility with past kernel versions. Initially,
when Unionfs supported Linux 2.4 it was easy to keep up with changing
kernels, since most of the changes between kernel versions were bug
fixes.
In December of 2004, Unionfs was ported to Linux 2.6 which
introduced additional complications. VFS changes between 2.4 and 2.6
(e.g., file pointer update semantics and locking mechanisms) required
#ifdefed sections of code to provide backward compatibility
with Linux 2.4. In addition, since we were supporting Linux 2.6, we
had to be conscious of the fact that the 2.6 kernel interfaces could
change between versions.
The benefit of supporting multiple kernel versions was that we could
enable the use of Unionfs on many different platforms. Although
LiveCD creators mostly preferred Linux 2.6 kernels, we found that some
of them were still working with 2.4. In addition, several people were
using Unionfs for embedded devices, which at the time tended to use
2.4 kernels. However, providing backward compatibility came with a
few disadvantages and raised the question of how far back we would go.
Because there is no standard kernel for LiveCD developers, there were
bug reports and compatibility issues across many different kernel
versions.
Although Unionfs supported multiple kernel versions, we had to choose
which versions to focus on. We increased the minimum kernel version
Unionfs required if: (1) it would make us #ifdef code that
was already #ifdefed for backward compatibility, or (2) if
it made the code overly complex. After Unionfs was ported to Linux
2.6, we found ourselves repeatedly raising the minimum kernel version
due to the large number of interface-breaking changes. For example,
2.6.11 introduced the unlocked_ioctl operation. The most
invasive change has been 2.6.16's new mutex system. Even though we
have stopped supporting backward compatibility, users often submit
backward-compatibility patches which we apply but do not support.
Along with backward compatibility came increased code complexity.
Although backward compatibility does not generally add much code, the
readability of the code decreased since we kept many sections of
#ifdefed code. Moreover, it made debugging more difficult
as Unionfs could run in more environments. In February of
2005, we decided to drop support for Linux 2.4 to reduce the
size and complexity of the code. By placing the restriction that
Unionfs will only support Linux 2.6, we were able to cut our
code base by roughly 5%. Although this is not a large percentage,
this increased maintainability greatly since it lowered the number of
environments that we had to maintain and test against. By removing
Linux 2.4 from our list of supported kernels, we eliminated eleven
different kernel versions that we were supporting. This also allowed
us to remove a number of bugs that were related to issues with
backward compatibility and which applied to Linux 2.4 only. Before
dropping support for a specific kernel version, we release a final
version of Unionfs that supports that kernel version.
Even though we removed 2.4 support from Unionfs, it did not end the
problems of backward compatibility. With Linux 2.6, a new development
process was introduced where code and interface changes that would
previously have been introduced in a development kernel are placed
into the stable branch. Linux 2.6.16 introduced a new set of locking
mechanisms where semaphores were replaced with mutexes. Although this
is one of the larger changes we have seen, there are many such changes
that force us to deal with backward compatibility within the 2.6
branch itself. This led us to decide in February of 2006 to
drop backward compatibility completely and only work with the latest
release candidate so that we can closely follow the kernel on our path
to inclusion. Since we make a release of Unionfs before every major
change we still have working copies of Unionfs for Linux 2.4 and
earlier versions of Linux 2.6.
3.2 Kernel Inclusion
In our efforts to prepare Unionfs to be submitted to the kernel
mailing list for discussion, we had to address three major issues.
First, due to the incremental nature of Unionfs's development, the
code base needed large amounts of reorganization to conform to kernel
coding conventions. Second, Unionfs user-space utilities use older
methods for interfacing with the kernel that needed to be replaced by
newer more desired methods, such as the use of configfs and
sysfs. Finally, features that were placed in Unionfs for
research interests needed to be removed to make the code base more
practical.
Since the Linux kernel is a massive project with people contributing
code to every component, there are very strict guidelines for the way
code should be organized and formatted. While reviewing the code
base for Unionfs, we realized that some of the functions were
unnecessarily long. Even now, due to the complex fan-out nature of
Unionfs, many of the functions are longer than we would like due to
loops and conditionals.
When looking into the methods available for a user-mode process to
communicate with our file system, we noticed one trend. Every time a
person introduces an ioctl, there is an objection and a
suggestion to find a better way of handling what is needed. Because
Unionfs uses several ioctls for adding branches, marking
branches read-only, and identifying which branch a file is on, we
decided that other methods should be explored. The preferred methods
for modifying and viewing kernel object states are configfs
and sysfs. Although both are good options, they both have
shortcomings that prevented us from using them.
In the case of configfs, the major concern was that the
module is optional. This issue could be addressed by marking
configfs to be selected by Unionfs, but that ignores a larger
issue. Many of the users of Unionfs are using it in embedded devices
and on LiveCDs. If we use configfs to control Unionfs's
configuration, we are forcing those users to use a larger kernel image
that exceeds their memory and storage constraints. With
sysfs we came across the issue of not having any
file-system-related kernel objects defined by sysfs.
To use sysfs, we would have to design and implement a
complete set of VFS kernel objects for sysfs and submit them
for kernel inclusion in addition to Unionfs.
To solve our problem of using ioctls for branch manipulation,
we decided to use the remount functionality that already exists in the
kernel. Remount allows one to change the configuration of a mount
while leaving its files open so processes can continue to use the
files after the remount operation is complete. This lets us provide
the ability to change branch configurations easily without the need
for ioctls, by parsing the new options that are passed in and
applying the differences between the new and old options. However,
this still requires us to maintain two ioctls for querying
files and another for debugging.
As of this writing, we are addressing a problem associated with
crossing mount points within a union. The most common occurrence of
this problem is when a LiveCD performs a pivot_root or a
chroot to a Unionfs mounted path. Currently LiveCD
developers mount Unionfs and then they proceed to move the mount
points for /proc and /sys to /unionfs/proc
and /unionfs/sys, respectively. After this they
pivot_root to the union so that proc and
sys are visible. The reason that this problem exists is that
currently Unionfs stacks on top of the superblock for each branch.
This presents a problem because it does not give us access to the data
structures that permit us to cross mount points. Our solution to this
problem is to redo how Unionfs stacks on top of the branches by
stacking on a dentry and a vfsmount structure. This
will give us the additional information that is needed to build the
structures necessary to cross mount points. Even with the ability to
cross mount points, it is not advised to stack on pseudo file systems
such as sysfs and procfs. Since sysfs and
procfs are not only accessed through Unionfs, but rather are
also manipulated directly by the kernel, inconsistencies can arise
between the caches used by Unionfs and these file systems.
Because Unionfs started as a research project, it had many
theoretically interesting features from a design perspective, which
users did not need in practice. Unionfs contains functionality for
copyup, this occurs when a file that exists on a read-only branch is
modified. When the file is modified Unionfs attempts to copy the file
up to the nearest read-write branch. Some of the early features of
Unionfs included several copyup modes, which allowed copyup to take
the permissions of the current user, the original permissions of the
file, or a set of permissions specified at mount time.
In addition, there were several delete modes which performed one of
three actions:
- delete=whiteout
(default) locates the first instance of the file and unlinks only that
instance. This mode differs from delete=first in that it
will create a whiteout for that file in the branch it removed the file
from.
- delete=all finds every instance of the file
across all branches and unlink them.
- delete=first
located the first instance of the file and unlinked only that instance
without creating a whiteout.
In the case of the delete mount option we found that no one was using
the delete=first and delete=all options and that the
delete=whiteout option was strongly preferred. Because our
user base is predominantly composed of LiveCD developers,
delete=first was removed and delete=all is only
present if Unionfs is compiled with UNIONFS_DELETE_ALL
defined.
We also had several modes to describe permissions with which a
whiteout was to be created. When a file is deleted Unionfs will
create a .wh.name file where name is the name of the file.
This tells Unionfs that it should remove this file from the view
presented to the user. These options were removed since we found that
copyup=currentuser and copyup=mounter went
completely unused by our users:
- copyup=preserve (default) creates the new file with the same
permissions that existed on the file which was unlinked.
-
copyup=currentuser creates the new file with the UID, GID,
and umask taken from the current user.
- copyup=mounter
creates the new file with UID, GID, and permissions specified in the
options string of the Unionfs mount.
Although the extra
options were interesting research concepts, they were not practical
for what our users were using Unionfs for and only served to increase
code complexity.
Another instance of where ideas that are good for research purposes
fail in practice is in the creation of whiteouts. Initially, when a
whiteout was created while removing a file, the whiteout was created
atomically via rename and was then truncated. This was done
so that if the process failed half-way through, there would not be any
ambiguity about whether the file existed. This added additional
complexity to the code without sufficient gains in either performance
or functionality. Since then, we have removed atomic whiteout
creation due to the inherent difficulty of maintaining the semantics
of open, yet deleted, files.
4 Limitations
During the development of Unionfs, we had to make certain design
decisions to help the overall implementation. Such decisions often
impose limitations. We have identified three such limitations in
Unionfs: modification of lower-level branches, mmap copyup
with dynamic branch management, and scalability. We discuss each in
detail below.
Modification of lower-level branches.
The current design of Unionfs and other stackable file systems on
Linux results in double caching of data and meta-data. This is an
unfortunate side-effect of the way the Linux VFS is
implemented-there is no easy coordination between objects cached at
different levels [1]. This forces us
to maintain a list of lower VFS objects for each upper object. For
example, a Unionfs inode contains an array of pointers to all the
corresponding inodes on the underlying branches. Unionfs has to copy
certain information from the underlying inode for a file to the Unionfs
inode: metadata information such as file size, access permissions,
group and owner, and so on.
Since Unionfs expects the underlying inode (and therefore the file) to
have certain properties about the file (e.g., have a size consistent
with that saved in the Unionfs inode) it is possible for
inconsistencies to appear if a process modifies the lower inode
directly without going through Unionfs. We encourage our users to
avoid modifying the lower branches directly. This works well in
scenarios where many of the branches are stored on read-only media
(e.g., LiveCDs). However, there are some people who want to use
Unionfs to provide a unified view of several frequently changing
directories. Moreover, if users delete or rename files or
directories, then Unionfs points to the older object, again yielding
an inconsistent view.
mmap copyup with dynamic branch management.
When Unionfs was first implemented in early 2004, only a
bare-bone functionality existed: the full set of system calls was not
implemented. Some of these system calls, in particular mmap, are
required for certain programs to function properly. The mmap
system call allows programs to map portions of files into a process's
address space. Once a file is mmapped, a process can modify
it by simply writing to the correct location in memory. Currently,
Unionfs does not natively implement mmap operations, but
rather passes them down unchanged to the lower-level file system.
This has the advantage of preventing double caching of data pages and
its associated performance and consistency pitfalls. However, this
comes with the drawback that Unionfs does not receive notification of
readpage or writepage calls, so it cannot perform
copyup during a commit_write. The problem occurs when a
process tries to modify a page backed by a file on a read-only medium.
Just like in the regular open-for-write case, we must copyup the file
to a writable branch and then perform the correct address space
operations.
In March 2006, Shaya Potter, a Unionfs user and contributor,
released a partial implementation of mmap. The major problem
with it is the lack of copyup functionality while using mmap.
Additionally, one has to be careful with the implementation since
certain file systems (e.g., OCFS2, GFS) must take additional steps
before calling prepare_write and commit_write. We
have made this mmap functionality a compile-time option which
is off by default.
Scalability.
Although we do not consider it as serious as the two previous issues,
the last issue is scalability. Even though most Unionfs users want
two to six branches, there are some that want more. In its current
state, the maximum number of branches that Unionfs supports is 1,024
due to the use of FD_SET and related macros. However, the
overhead of using Unionfs becomes high with just 200 branches, even
for simple operations such as readdir and lookup
(see our evaluation in Section 5). The problem
with these operations is that Unionfs needs to iterate through all the
branches; for each branch it needs to determine whether or not it
is a duplicate, whiteout, and so on. Currently, we are storing
stacking information in a simple linear array. This structure, while
easy to access and use, has a search complexity of O(n).
Of course, there are other operations, such as llseek
operating on directories, which should be examined and possibly
optimized. For other operations, Unionfs is a bit more efficient
because it can use the dentry cache objects that have been populated
by lookup.
5 Evaluation
We conducted our benchmarks on a 1.7GHz Pentium 4 machine with 1.25GB
of RAM.
Its system disk was a 30GB 7,200 RPM Western Digital Caviar IDE
formatted with Ext3.
In addition, the machine had one Maxtor 7,200 RPM 40GB IDE disk
formatted with Ext2, which we used for the tests. We remounted the
lower file systems before every benchmark run to purge file system
caches. We used the Student-t distribution to compute the 95%
confidence intervals for the mean elapsed, system, user, and wait
times. Wait time is the elapsed time less CPU time used and consists
mostly of I/O, but process scheduling can also affect it. In each
case, the half-widths of the confidence intervals were less than 5%
of the mean. The test machine was running a Fedora Core 4 Linux
distribution with a vanilla 2.6.16-rc6 kernel.
In all the tests, the highest-priority branch was read-write, while
all the other branches, if any, were read-only. More detailed
evaluation can be found in our journal article [10].
5.1 Evaluation Workloads
We chose to perform two benchmarks to test the extreme cases-on one
end of the spectrum there are CPU-intensive workloads, while on
the other end there are I/O-intensive workloads.
OpenSSH build.
Building OpenSSH [8] is a CPU-intensive benchmark. We used
OpenSSH 4.0p1, which contains 74,259 lines of code. It performs several
hundred small configuration tests, and then it builds 155 object
files, one library, and four scripts. This benchmark contains a fair
mix of file system operations, representing a workload characteristic
of users. The highest-priority branch was read-write, while all the
other branches, if any, were read-only
Postmark.
Postmark v1.5 simulates the operation of electronic mail
servers [3]. It performs a series of file system
operations such as appends, file reads, creations, and deletions.
This benchmark uses little CPU but is I/O intensive. We configured
Postmark to create 20,000 files, between 512-10,240K bytes in size,
and perform 200,000 transactions. We used 200 subdirectories to
prevent linear directory look ups from dominating the results. All of
the branches were read-write, to distribute the load evenly across
branches. This is because Postmark does not have an initial working
set, therefore using read-only branches does not make sense for this
benchmark.
5.2 Results
On average, Unionfs incurred only 10.7% maximum overhead over Ext2 on
the OpenSSH compile, and 71.7% overhead over Ext2 on Postmark. These
results are somewhat worse compared to our previous
benchmarks [10]. However, the difference in the
OpenSSH compile benchmark appears mainly in I/O wait time, which could
be contributed to copyup taking place. We did not use copyup in our
previous benchmark.
OpenSSH build.
We performed the OpenSSH compile with two different layouts of
the data. The first distributed all the files from the source code
tarball over all the branches using a simple round robin algorithm.
The other layout consists of a copy of the entire source tree on each
branch.
For both layouts, we have measured and plotted the elapsed, system,
and user times.
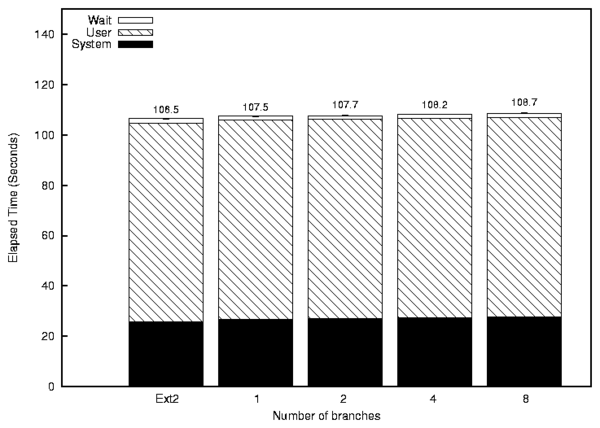 Figure 5: OpenSSH compile: Source code uniformly distributed across all branches.
When the OpenSSH source code is uniformly distributed across all the
branches, the overhead is a mere 0.99% (Figure 5).
This is due to the simple fact that we must perform several additional
function calls before we hand of control to the lower file system
(Ext2). With more branches, the overhead slightly increases to 2.1%
with 8 branches. This shows that Unionfs scales roughly linearly for
this benchmark.
Figure 5: OpenSSH compile: Source code uniformly distributed across all branches.
When the OpenSSH source code is uniformly distributed across all the
branches, the overhead is a mere 0.99% (Figure 5).
This is due to the simple fact that we must perform several additional
function calls before we hand of control to the lower file system
(Ext2). With more branches, the overhead slightly increases to 2.1%
with 8 branches. This shows that Unionfs scales roughly linearly for
this benchmark.
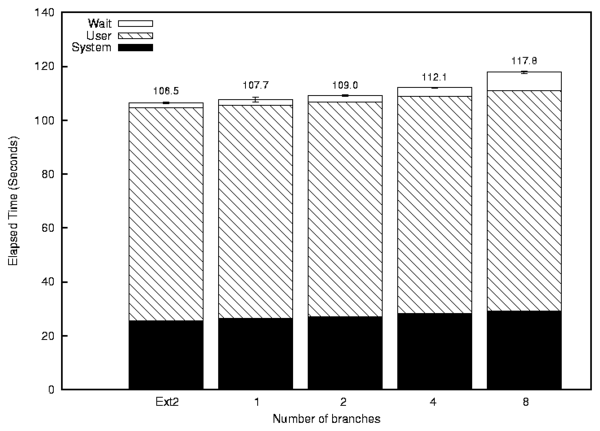 Figure 6: OpenSSH compile: Source code duplicated on all branches.
With the OpenSSH source code duplicated on all branches
(Figure 6), the overheads were slightly higher.
A single branch configuration incurred 1.2% overhead. The slight
increase in time is a logical consequence of Unionfs having to check
all the branches, and on each branch dealing with the full source code
tree which slows down linear directory lookups. The 8-branch
configuration increased runtime by 10.7%. As with the previous
data layout, Unionfs scales roughly linearly.
Postmark.
Figure 7 shows the elapsed, system, and user time
for Postmark. The elapsed time overheads for Unionfs are in the range
of 64.0-71.7% above that of Ext2. Since Postmark is designed to
simulate I/O intensive workloads, and all the VFS operations have to
pass through Unionfs, it is not surprising that the overhead of
Unionfs becomes apparent. Fortunately, typical user workloads are
not I/O bound and therefore one will not notice much performance
degradation as shown by the OpenSSH compile benchmarks.
Figure 6: OpenSSH compile: Source code duplicated on all branches.
With the OpenSSH source code duplicated on all branches
(Figure 6), the overheads were slightly higher.
A single branch configuration incurred 1.2% overhead. The slight
increase in time is a logical consequence of Unionfs having to check
all the branches, and on each branch dealing with the full source code
tree which slows down linear directory lookups. The 8-branch
configuration increased runtime by 10.7%. As with the previous
data layout, Unionfs scales roughly linearly.
Postmark.
Figure 7 shows the elapsed, system, and user time
for Postmark. The elapsed time overheads for Unionfs are in the range
of 64.0-71.7% above that of Ext2. Since Postmark is designed to
simulate I/O intensive workloads, and all the VFS operations have to
pass through Unionfs, it is not surprising that the overhead of
Unionfs becomes apparent. Fortunately, typical user workloads are
not I/O bound and therefore one will not notice much performance
degradation as shown by the OpenSSH compile benchmarks.
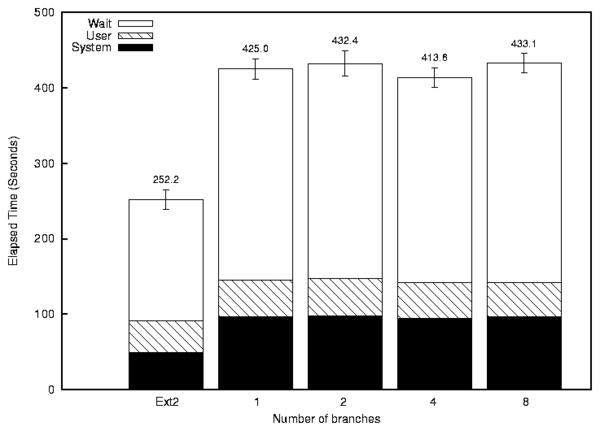 Figure 7: Postmark: 20,000 files and 200,000 transactions.
Figure 7: Postmark: 20,000 files and 200,000 transactions.
6 Conclusion
It is often easy to create a piece of software whose functionality is
enough for the authors. However, that functionality is usually a
subset of that required by real users. Since the first release in
early 2004, user feedback has helped us make Unionfs more
complete and stable than it would have been had a small team of
developers worked on it without any community feedback. Our users
have used Unionfs for applications that were not even considered back
when Unionfs was originally designed, and located bugs that would
otherwise have gone unnoticed.
For quite some time, Linux users wanted a namespace unifying file
system; Unionfs gives them exactly that. While there are still
several known issues to deal with, Unionfs is steadily becoming a
polished software package. With the increasing use and popularity of
Unionfs we felt that the next logical step was to clean up Unionfs and
submit it for kernel inclusion.
7 Acknowledgments
Unionfs would not be in nearly as good a state if it was not for our
user community, which has submitted bug reports, patches, and
provided us with interesting use cases. There are far too many
contributors to list individually (there are over 37 listed in our
AUTHORS file, which only includes those who have submitted
patches), and we extend thanks to all contributors and users, named
and unnamed. Early adopters and bug reporters like Tomas Matejicek
and Fabian Franz helped immeasurably. Recently, Junjiro Okajima has
fixed many bugs and can be counted on for high-quality patches. The
experimental mmap code currently in Unionfs was contributed
by Shaya Potter. Jay Dave, Puja Gupta, Harikesavan Krishnan, and
Mohammad Nayyer Zubair worked on Unionfs in its early stages.
This work was partially made possible by NSF CAREER award
EIA-0133589, NSF Trusted Computing Award CCR-0310493,
and HP/Intel gift numbers 87128 and 88415.1.
Unionfs is released under the GPL. Sources and documentation can be
downloaded from http://unionfs.filesystems.org.
References
- [1]
-
J. S. Heidemann and G. J. Popek.
Performance of cache coherence in stackable filing.
In Proceedings of the Fifteenth ACM Symposium on Operating
Systems Principles (SOSP '95), pages 3-6, Copper Mountain Resort, CO,
December 1995. ACM SIGOPS.
- [2]
-
Inside Security IT Consulting GmbH.
Inside Security Rescue Toolkit.
http://insert.cd, 2006.
- [3]
-
J. Katcher.
PostMark: A New Filesystem Benchmark.
Technical Report TR3022, Network Appliance, 1997.
www.netapp.com/tech_library/3022.html.
- [4]
-
P. Kerr.
m-dist: live linux midi distribution.
http://plus24.com/m-dist/, 2005.
- [5]
-
K. Knopper.
Knoppix Linux.
www.knoppix.net, 2006.
- [6]
-
P. Lougher.
SQUASHFS - A squashed read-only filesystem for Linux.
http://squashfs.sourceforge.net, 2006.
- [7]
-
T. Matejicek.
SLAX - your pocket OS.
http://slax.linux-live.org, 2006.
- [8]
-
OpenBSD.
OpenSSH.
www.openssh.org, May 2005.
- [9]
-
J. Silverman.
Clusterix: Bringing the power of computing together.
http://clusterix.net, 2004.
- [10]
-
C. P. Wright, J. Dave, P. Gupta, H. Krishnan, D. P. Quigley, E. Zadok, and
M. N. Zubair.
Versatility and unix semantics in namespace unification.
ACM Transactions on Storage (TOS), 2(1):1-32, February 2006.
- [11]
-
C. P. Wright and E. Zadok.
Unionfs: Bringing File Systems Together.
Linux Journal, (128):24-29, December 2004.
- [12]
-
E. Zadok and J. Nieh.
FiST: A Language for Stackable File Systems.
In Proc. of the Annual USENIX Technical Conference, pages
55-70, San Diego, CA, June 2000. USENIX Association.
File translated from
TEX
by
TTH,
version 3.76.
On 8 Sep 2006, 12:07.